изработени от подръчни материали .
Използвах за диска на буфера пласмаса от дискета за компютър
изрязах дисковете със замби 4мм но не через сечене а я закачих на дрелката и с въртене
става по хубав срез отколкото через чукане по замбата
За стебло използвах черен филър за 3Д принтер .
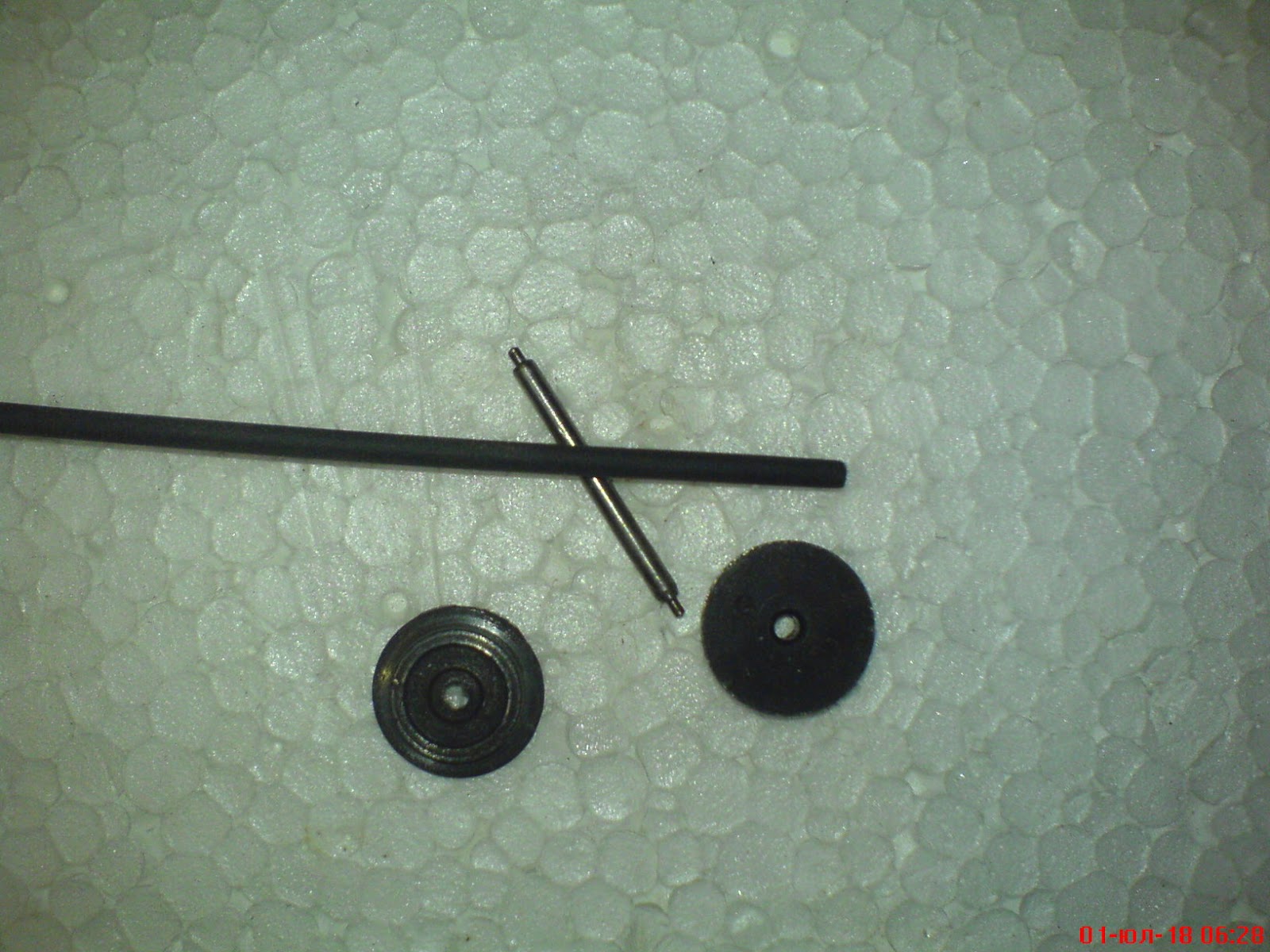
Слагам една капка моментно лепило на парчето филър и се стремим да уцелим средата на
диска и се получава нещо такова

И като изсъхне лепилото след около 20 мин се получава така

За цилиндър на буфера ползвах тръбичка от клечка за уши от тея дето са с памучето
обаче трябва да се раздуе с ос 2мм за да се плъзга буфера свободно.
Не съм експерементирал просто така си мисля че буфера трябва да се движи дето се вика с поглед само да се прибира.
Тек идва и по проблемната част какво по дяволите да кара буфера да пружинира
Мислих умувах чесах се там дето не ме сърби щото пружини имам хиляди видове ама
много твърди подяволите не става нито от химикалка нито от запалка нито от разни
контактори и релета . А и ще е проблем също и самото закрепване. Първо рекох с пърче дунапрен или гума ама дунапрена няма достатъчно сила да върне а кумата пък иска повече натиск което на мен ми се стори че не е желателно нали идеята е буфера да се движи с поглед
но и надеждно да се връща напред когато няма натиск.
И накрая рекох да пробвам с прозрачна пласмаса това е за изолация на електроники
конкретно тази която ползвам е от електроники за палене на луминисцентни лампи
аз е ползвам и за направата на прозорци на вагони и локомотиви.
Изрязва се тънка лентичка и се сгъва на две по средата и с пинсетите стискаме хубаво згъвката


И вече може да преминем към залепяне на пружиното устройство . Съвсем малко лепило просто по двата ръба се слака намества се на вагона плътно до буфера и стискаме известно време с пинсетата докато залепне.


трябва да се залепи само по края за да може тая пласмаска да пружинира
И така вече буферите се движат съвсем свободно
Тук представям просто идеята ясно е че изпълнението може да бъде много по добро от мойто
а и материалите може да са съвсем различни
Накрая се получава ей това